









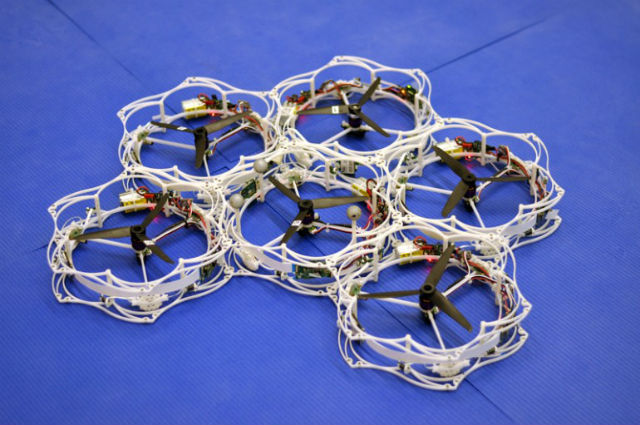
Исследователи из Швейцарского федерального института технологий в Цюрихе (ETH) сконструировали самособирающийся мультикоптер: шесть небольших шестиугольных роботов, которые самостоятельно объединяются в единую конструкцию при взлёте, образуя многовинтовой вертолёт.
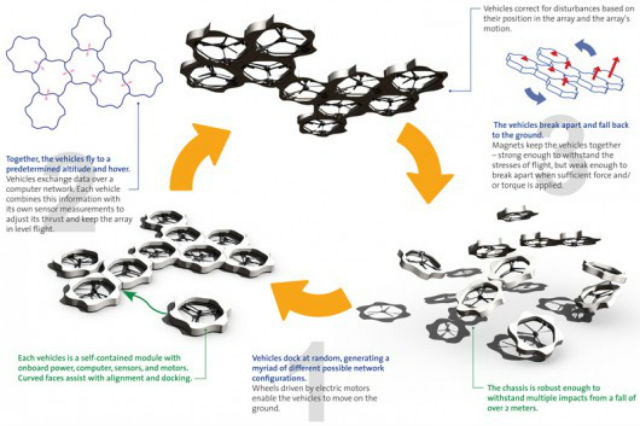
Последовательность действий следующая: на землю ставят несколько модулей, составляющих мультикоптера. Каждый модуль-робот оснащён тремя колёсами, способными вращаться в любом направлении. Все роботы запрограммированы на поиск единой локации, к примеру, ярко освещённой местности. Как только они приближаются друг к другу, один модуль начинает вращаться вокруг своей оси, а другие обращаются вокруг него. На внешней стороне каркаса каждого модуля расположена блокирующая вкладка, которая обеспечивает физическое подсоединение, а данные передаются с помощью инфракрасных лучей.

После того, как все модули присоединились друг к другу, происходит короткая калибровка датчиков, а затем весь мультикоптер взмывает вверх. Половине коптеров необходимо крутить свои пропеллеры по часовой стрелке, а другой половине — против часовой. Это необходимо для того, чтобы компенсировать крутящий момент.
Максимилиан Кригледер (Maximilian Kriegleder), Рэймонд Оунг (Raymond Oung), Раффаэлло ди Андреа (Raffaello D’Andrea) и их коллеги разработали модель мультикоптера таким образом, чтобы он мог принимать любую конфигурацию в зависимости от ситуации. Изобретение получило название DFA — Distributed Flight Array. Если переводить вольно, то получается "рассредоточенный летающий строй".
Как только мультикоптер взлетает в воздух, на каждом из шестигранников включается инерциальный датчик, который контролирует наклоны, повороты и вращения в полёте. Подобную технологию видел каждый, кто держал в руках смартфон iPhone или планшет iPad: такой же датчик переворачивает картинку на экране при наклонах.
Каждый модуль может корректировать свою траекторию полёта и общую конфигурацию мультикоптера. Если наклоны влево-вправо, вперёд-назад слишком сильные, то один из шестигранников или сразу несколько сбавляют скорость вращения несущего винта. Направление движения и ось вращения роботы определяют, обмениваясь данными прямо в воздухе.
Когда "стая" достигает определённой высоты (для её измерения также имеется специальный датчик), модули разъединяются и падают на землю. При этом отдельно от конструкции один коптер работать не может из-за того, что крутящий момент не будет ничем компенсирован.
По словам авторов проекта, понять и предусмотреть все тонкости работы летающего аппарата произвольной формы было крайне непросто. Получилось всё не с первого раза, конструкцию несколько раз видоизменяли. Изначально исследователи создали модули, которые скреплялись с помощью магнитов, а коммуникацию обеспечивали маленькие электрические контакты.
Вторая модель выглядит несколько более надёжной: модули скрепляются с помощью механической защёлки, а общение обеспечивается бесконтактными инфракрасными лучами. Немаловажно, что каркасы модулей и первого, и второго мультикоптера были напечатаны на 3D-принтере из пластиковых чернил.
Один из авторов этой разработки, Раффаэлло ди Андреа, уже имеет большой опыт в создании робототехники и распределённого управления. Он является сооснователем компании Kiva Systems, которая известна тем, что поставляет роботов, управляющих товарами на складе крупного интернет-магазина amazon. Роботы ищут необходимый товар на полке, а затем передают его сотрудникам, которые уже упаковывают его в коробку.
Авторы проекта ранее создали "куб" с автоматической балансировкой: каждый сегмент конструкции обладал собственной системой определения центра тяжести, вследствие чего грани могли собираться в произвольные формы, балансирующие самостоятельно.
Другой впечатляющей разработкой сотрудников Швейцарского федерального института технологий является установка Blind Juggler — "слепой жонглёр". Она представляет собой круглую металлическую платформу, которая поднимается и опускается, заставляя подпрыгивать маленький шарик на её поверхности. При этом шарик никогда не скатывается с края платформы, поскольку устройство самостоятельно регулирует его местоположение, обеспечивая полный контроль. Интереснее всего то, что Blind Juggler не оснащён никакими датчиками и не имеет "мозг" в виде компьютера.

Ди Андреа и его коллеги признаются, что идея создания мультикоптера из нескольких составляющих изначально принадлежала природе. Инженеры вдохновлялись тем, как некоторые животные и насекомые сбиваются в стаи, образуя единую структуру без централизованного управления. Очень важно, чтобы в таком массиве отдельных модулей не было единого центра, контролирующего деятельность всех остальных модулей. Иначе бы конструкция была уязвимой.
Следующим шагом будет устранение какого-либо человеческого участия в управлении мультикоптером. На данный момент следить за тем, чтобы аппарат не улетел слишком далеко, должен следить оператор с пультом дистанционного управления. Разработчики надеются, что когда-нибудь они смогут сделать DFA полностью автономным и даже способным менять конфигурацию в полёте.
"DFA представляет собой объект исследования и может послужить в образовательных целях. Когда мы создавали его, мы не рассчитывали коммерциализировать миникоптер. Потенциально он пригоден для мелкомасштабных транспортировок, но о практическом применении мы не думали", — рассказал один из авторов разработки Рэймонд Оунг.
Также по теме:
Американцы продемонстрировали манёвры роя из 20 миникоптеров
Армия из сотни килоботов научилась действовать сообща
Летающих нанороботов научили играть музыку
Физики превратили пузырьки воздуха в микророботов
Видео: Состязание летающих роботов
