











Проект, над которым последние годы трудилась команда инженеров из Исследовательского центра искусственного интеллекта DFKI, называется iStruct. Учёные создали робота-обезьяну, способного самостоятельно передвигаться на четырёх конечностях во всех направлениях: вперёд, назад и даже в бок.
Появление робота-животного — уже не сенсация. Ранее инженеры из разных стран создавали робота-гепарда, робота-богомола, робота-стрекозу и других высокотехнологичных "зверей" и "насекомых".
На этот раз источником вдохновения стала обезьяна. Более того, если приглядеться, то нетрудно заметить, что iStruct передвигается скорее как горилла, нежели как шимпанзе или любая другая обезьяна. Инженеры пытались максимально тщательно повторить анатомию животного, обеспечивающую ему узнаваемую манеру передвижения.

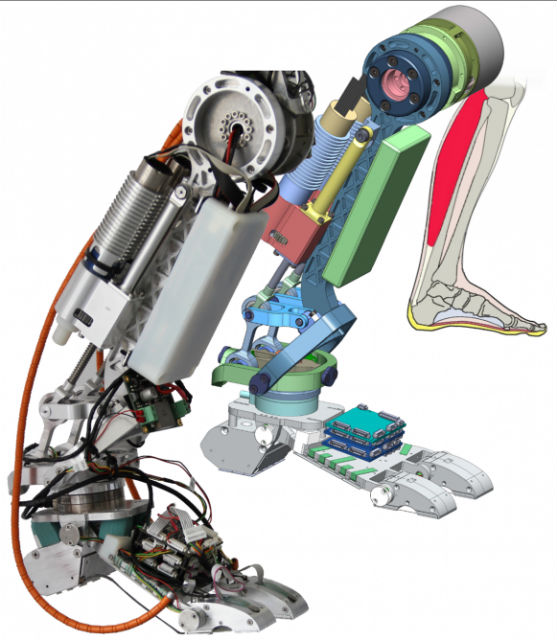
"Анатомия" робота-гориллы максимально точно повторяет естественный скелет животного. Учёные снабдили его позвоночником, подсоединённым к "костям таза", что обеспечивает роботу гибкость при передвижении. Каждая конечность оснащена специальными сенсорами, которые реагируют на структуру поверхности, по которой робот идёт.
Также iStruct обладает 43 отдельными датчиками на основе силоизмерительных резисторов (FSR) и шестью дополнительными FSR-датчиками, расположенными на открытых поверхностях и реагирующими на удары. Шестикоординатный силомоментный датчик, датчики расстояния, встроенные в конечности для предупреждения ударов, трёхкоординантный индикатор ускорения — всё это необходимо для безопасного и естественного передвижения робота. Два температурных сенсора реагируют на тепловые изменения в корпусе, а цифровой магнитный кодовый угломер следит за каждым движением конечностей.
Все эти многочисленные приборы и датчики являются стандартным набором для роботов, имитирующих движения животных. Новым является разве что "позвоночник", благодаря которому механическая горилла плавно передвигается на четырёх лапах.
К слову, попытка создать робота-примата уже предпринималась в 2008 году: Дэниэл Кюн (Daniel Kühn) работал над проектом, который назывался Little Ape — "маленькая обезьянка". Уже тогда робот ходил на четырёх конечностях, словно животное. После того, как проект свернули в 2009 году, Кюн начал трудиться над iStruct, внеся некоторые модификации в свою первоначальную идею.
В первую очередь, робота решили сделать крупнее. Сегодня он весит 18 килограммов и обладает параметрами 66 x 43 x 75 сантиметров и 26 степенями свободы, которые обеспечивают электродвигатели.
Создание робота-обезьяны является частью масштабной программы, основанной Агентством немецкого центра авиации и космонавтики (DLR).
Авторы проекта пока не высказывали своих точных целей. Но iStruct классифицируется как "космический робот" (Space Robot). То есть механическая горилла создана для того, чтобы в будущем она участвовала в космических миссиях, выполняя необходимые функции в условиях слишком опасных для человека. Роботы, вероятно, будут не только колонизировать другие планеты и их естественные спутники, но и работать на космических кораблях. Вполне вероятно, что однажды наступит день, когда корабль на далёкую планету поведёт робот-пилот.
В этом отношении стоит добавить, что изначально, понимая, что одной из первых миссий iStruct будет полёт на Луну, немецкие учёные рассматривали возможность создания комбинации из ходячего робота и робота на колёсах. Но впоследствии от идеи с колёсами отказались. Тем не менее, в ходе тестирования нового чуда техники инженеры "тренировали" робота передвигаться по имитации лунной поверхности.
У конструкции, напоминающей тело обезьяны, есть ряд преимуществ перед роботом на колёсах. Во-первых, искусственные конечности обеспечивают большую стабильность корпуса во время передвижения по ухабистой поверхности. Во-вторых, имея "лапы", робот сможет с лёгкостью встать после падения. В-третьих, если ему необходимо будет сделать что-то "руками", то стоять на задних конечностях для механической гориллы не составит труда.
С возросшим интересом общественности к повторному исследованию Луны робототехники поняли, что необходимо создавать роботов, способных организовать целую колонию на нашем естественном спутнике. Необходимо, чтобы это были не просто управляемые роверы, изучающие грунт, но создания, обладающие искусственным интеллектом, способные реагировать на те или иные ситуации.
Поэтому одной из главных задач глобального проекта по конструированию роботов, похожих на животных, является создание механизма, способного реагировать на изменения внешней среды.
Также по теме:
Швейцарские ученые сконструировали робота-гепарда
Робота-амфибию научили бегать, ползать и плавать
Японцы учат листообразного робота покорять любой ландшафт
Беспилотный летательный аппарат научили орлиным навыкам
Создан робот-медуза, приводимый в движение клетками сердечной мышцы крысы
Инженеры Гарварда научили мягкого робота маскироваться под окружающую среду
